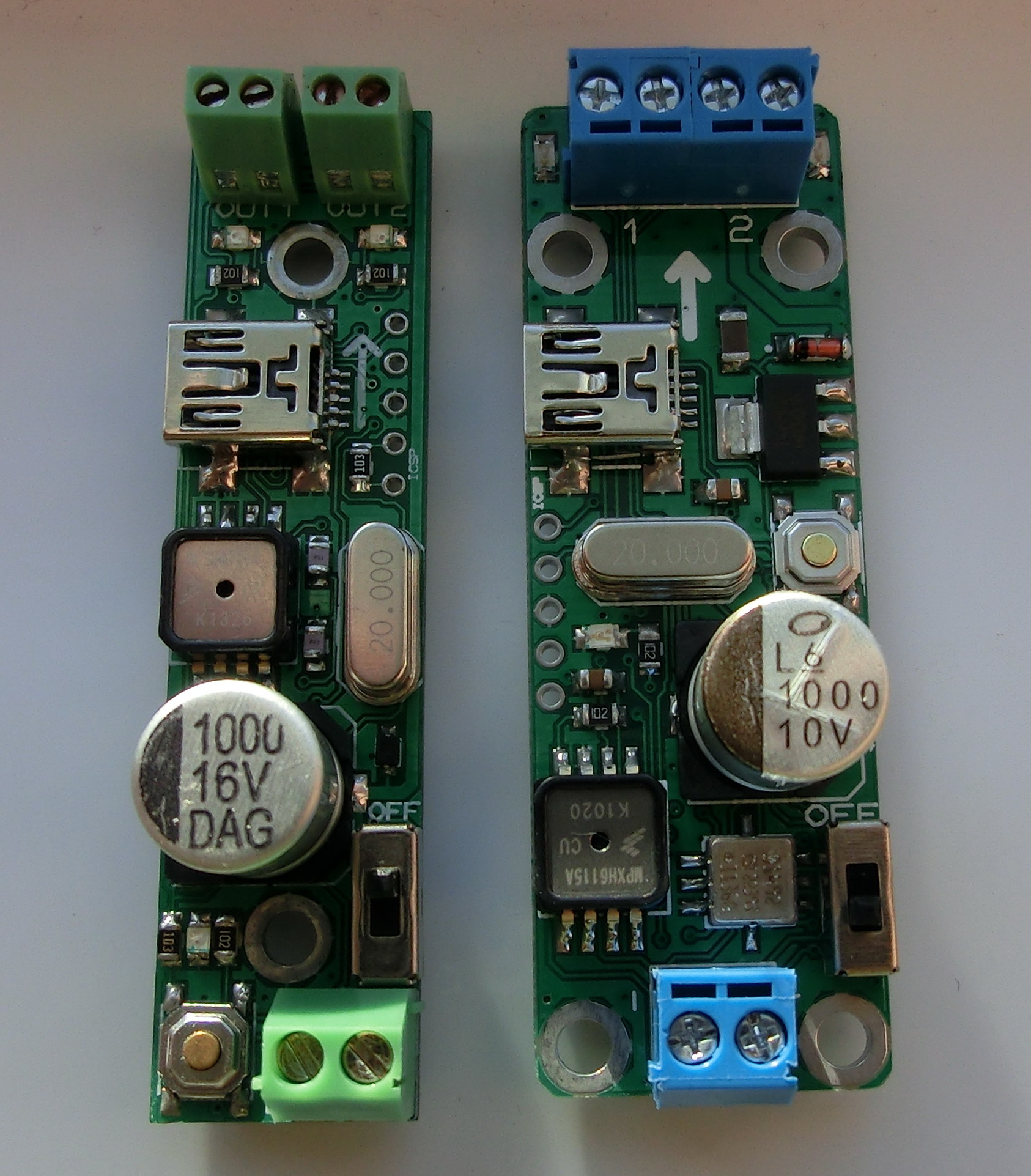
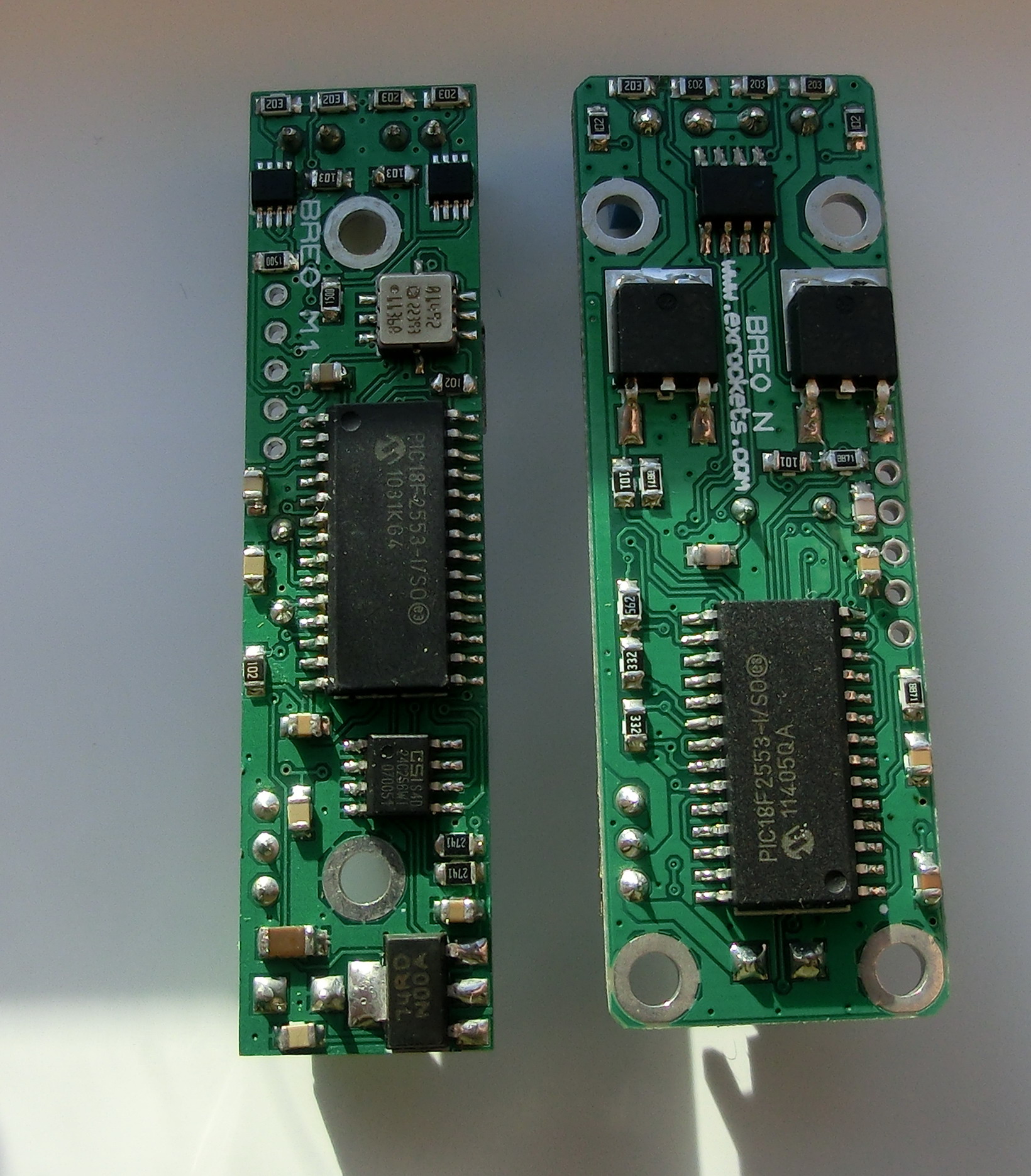
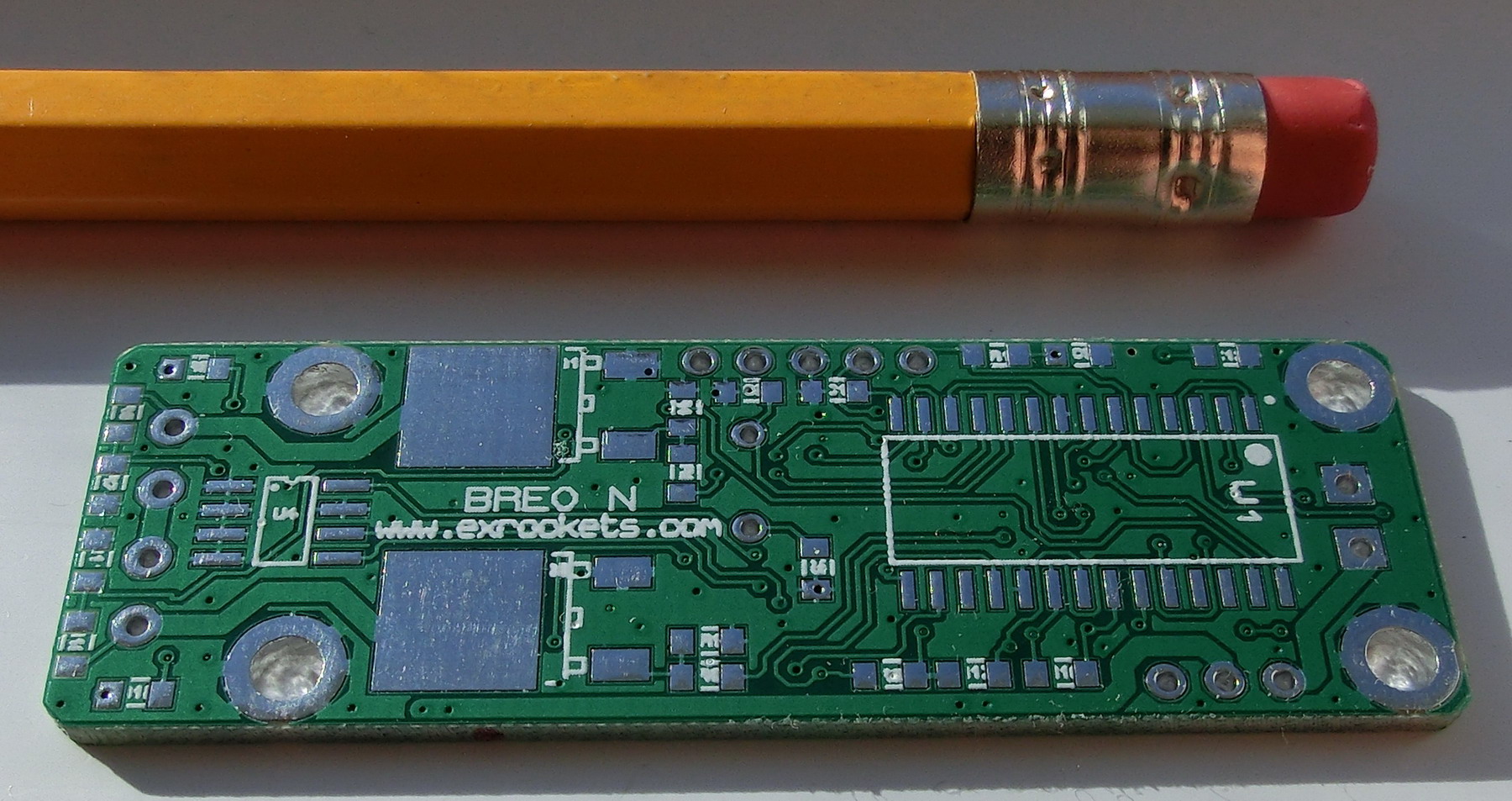
This small flight computer is the same computer as my MINI FLIGHT COMPUTER (BREO M) but it has two more powerful MOSFET transistors instead of the small ones I used on BREO M and the mounting holes are 4 at the corners instead of 2 in the middle which makes it much easier to solder and to install in the rocket.
In order to fit the two larger D-PACK MOSFETs I had to increase the width with 5 mm so the new dimensions are 60x20x15 mm. Nevertheless, BREO N still has the same excellent functionality as BREO M. The main characteristics are:
– Barometric altitude measurement up to 18km
– High g acceleration sensor
– 40 samples per second / 13 bit ADC
– 3.5 minutes recording time
– Igniters connectivity check for both channels (LEDs for each channel will show the status of the igniter)
– USB connection
– 7.5 to 16 VDC power supply with on-board ON-OFF switch
– 10A (40A pulse) MOSFET for each channel
– Selectable on-time for each channel (between 0.1 and 5 seconds)
– Each channel has igniter connectivity feedback for back-up purposes (one channel can substitute the other in case a defective igniter is detected during flight)
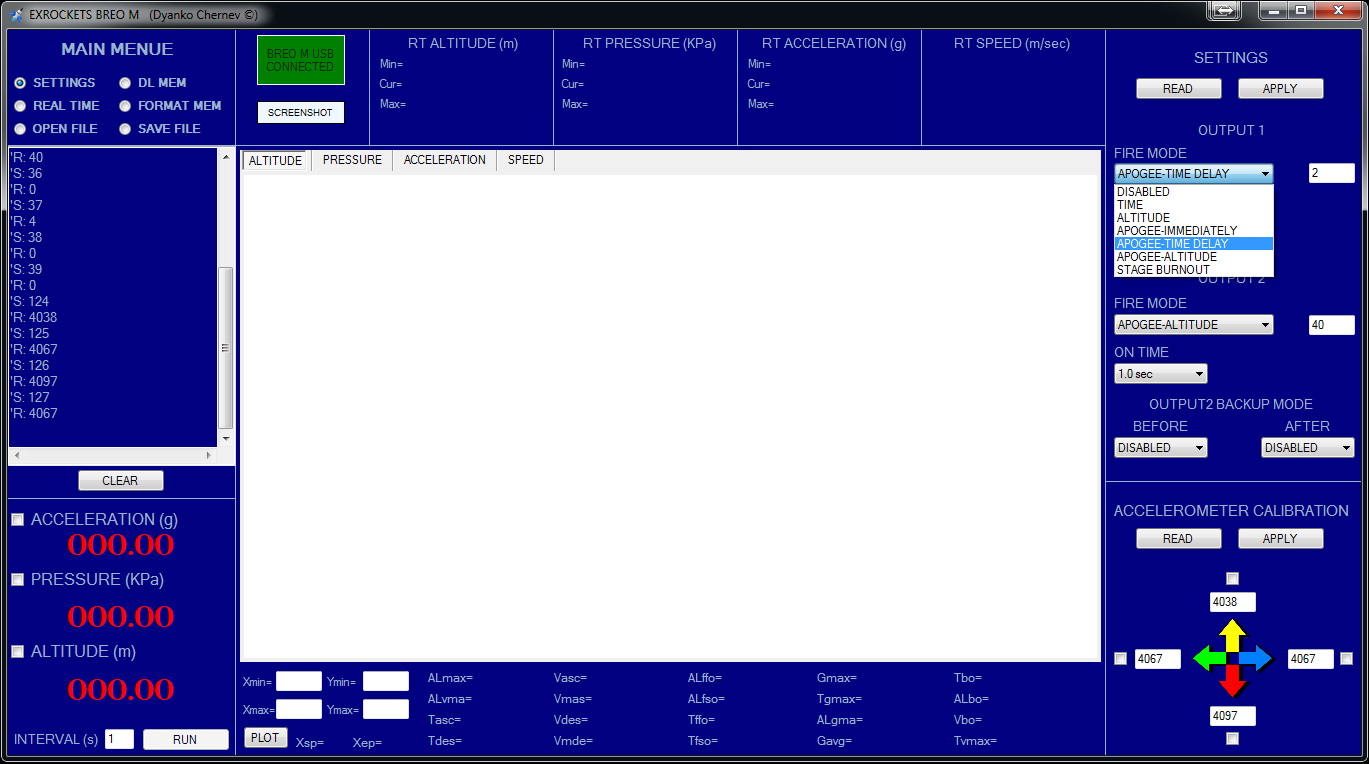
– 2 individually programmable outputs where each output can be set up for one of the following events:
1.DISABLED – Output won’t fire
2.TIME – Fire after the time elapsed (in seconds)
3.ALTITUDE – Fire as soon as the predetermined altitude is reached (in meters)
4.APOGEE-IMMEDIATELY – Fire at apogee
5.APOGEE-TIME DELAY – Fire n seconds after apogee
6.APOGEE-ALTITUDE – Fire at a predetermined altitude after the apogee has been reached (in meters)
7.STAGE BURNOUT – Fire as soon as the initial acceleration falls below 1 (motor burnout)
As I said compared to BREO M, the new flight computer, BREO N is slightly larger and about 50% heavier (12gr instead of 8gr) because of the MOSFETs.
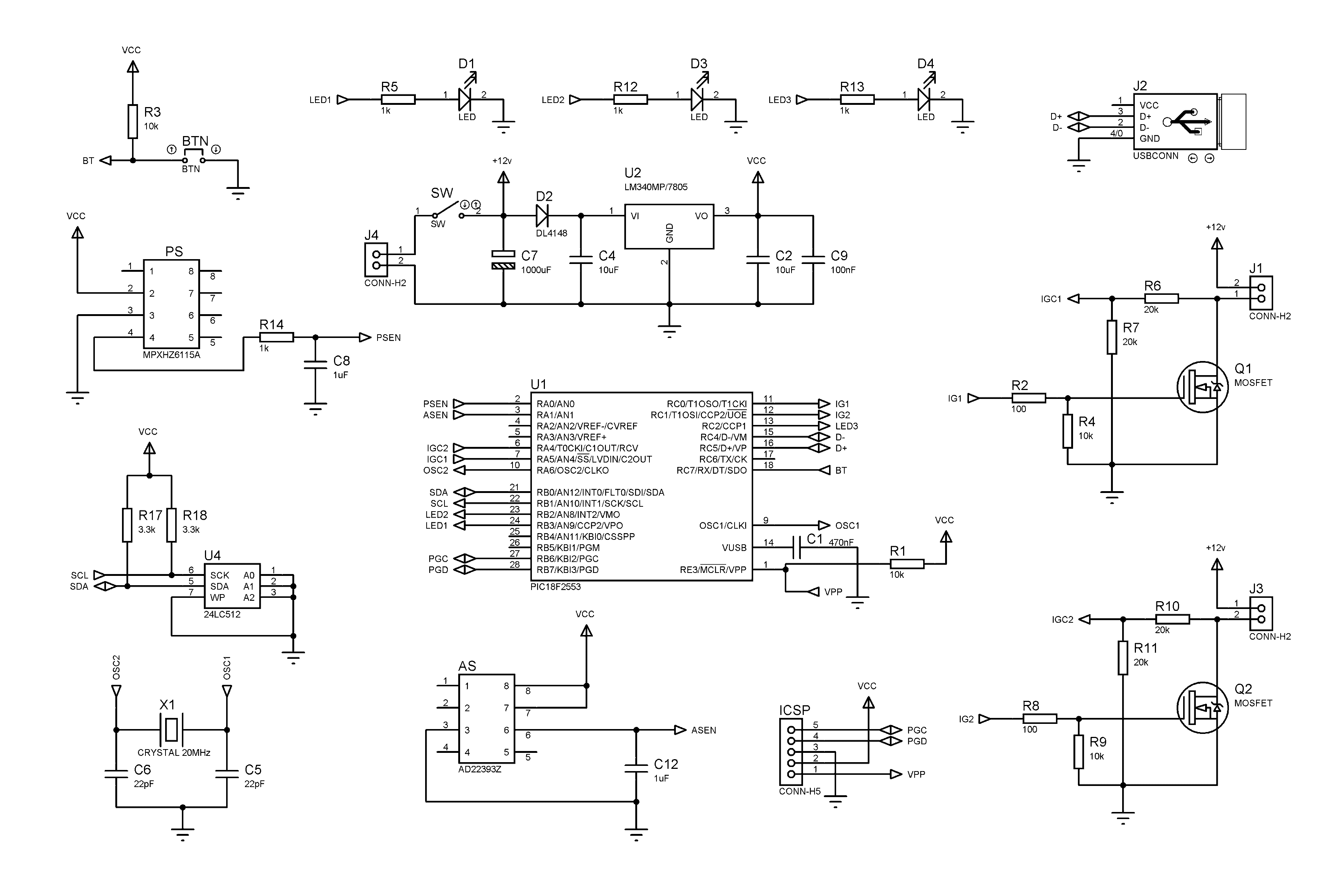
The schematic for BREO N remains the same:
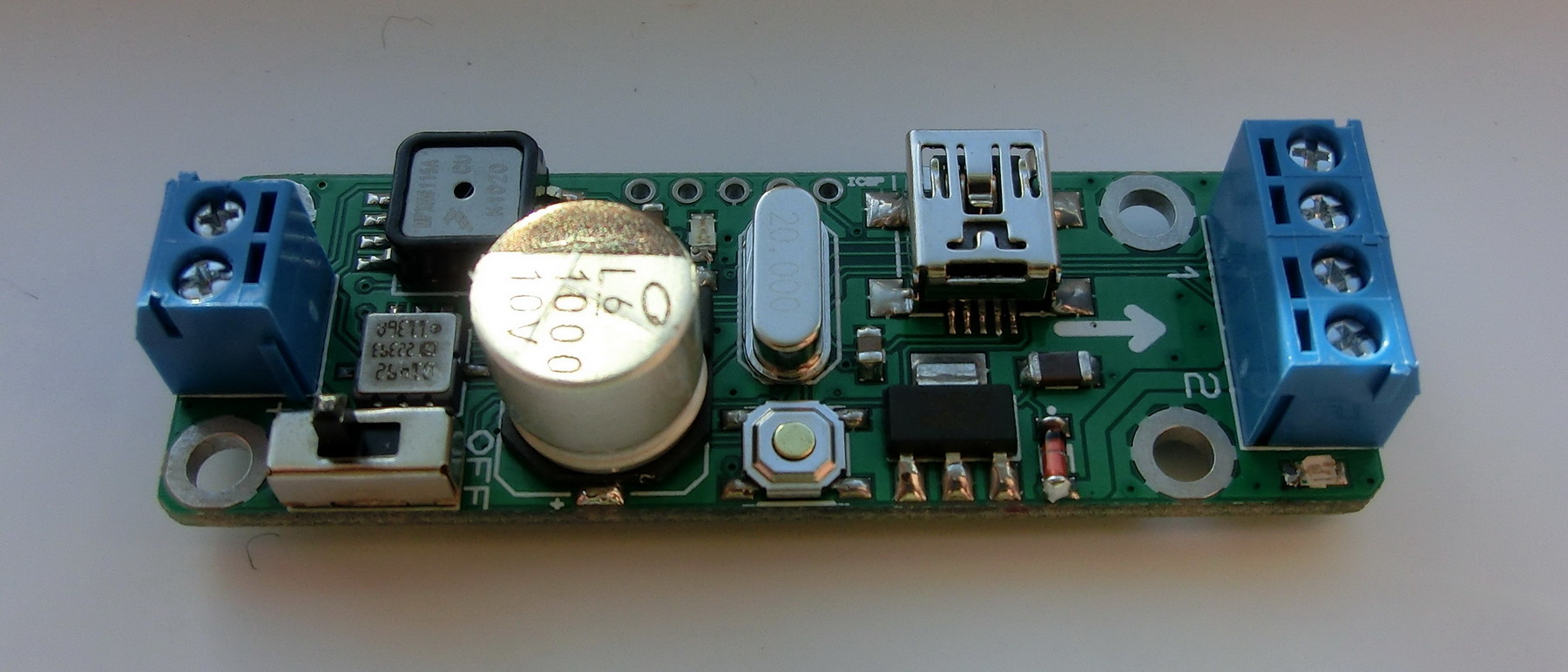
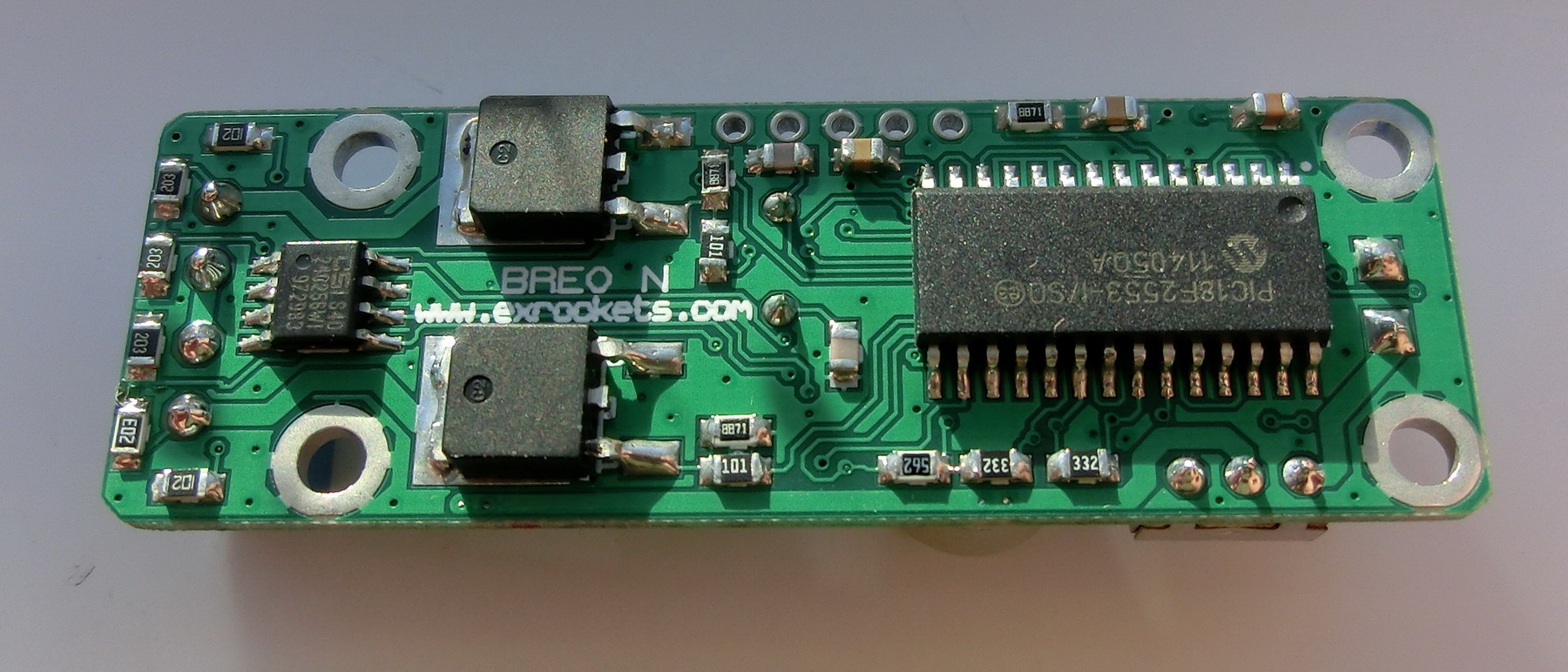
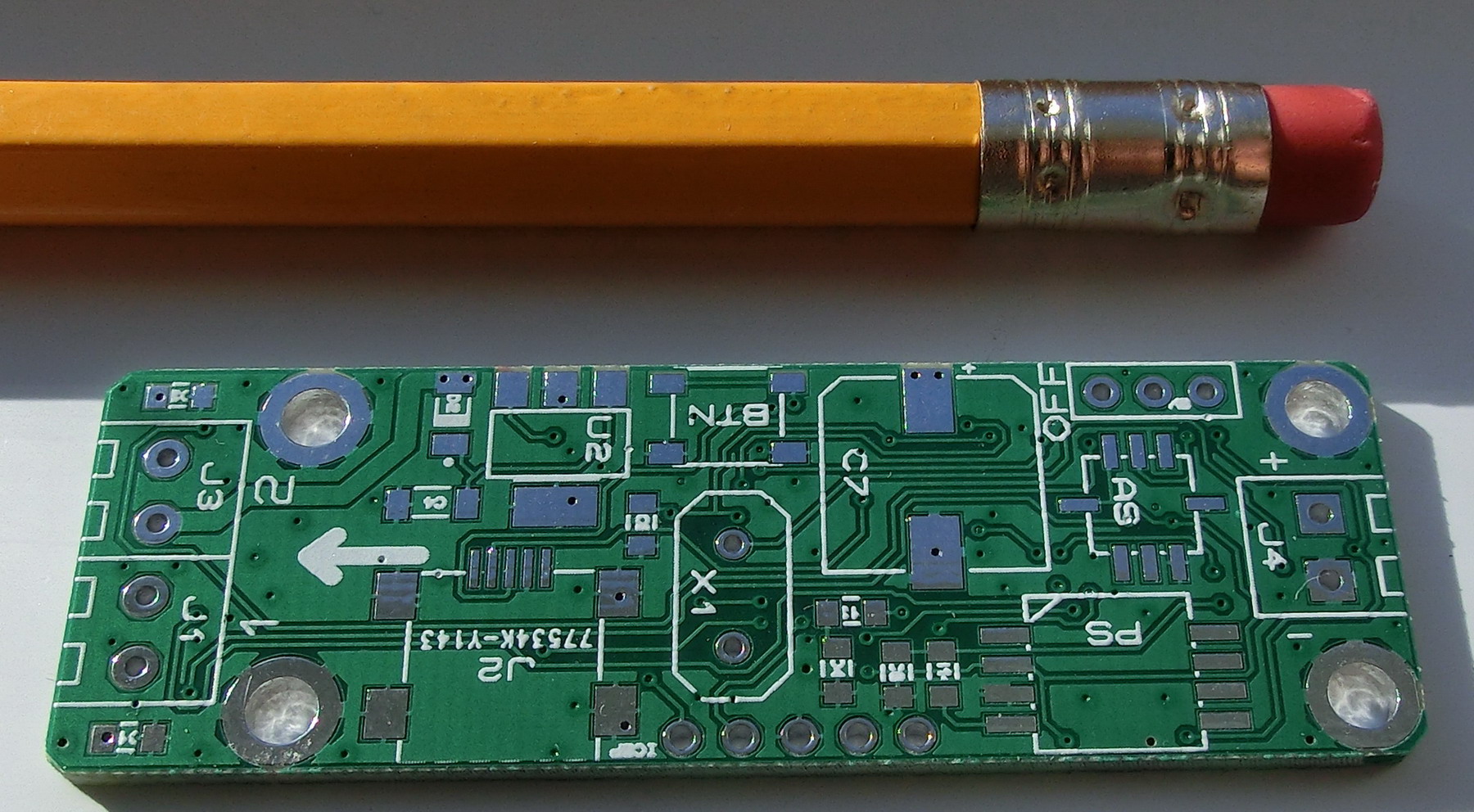
Of course the PCB is different:
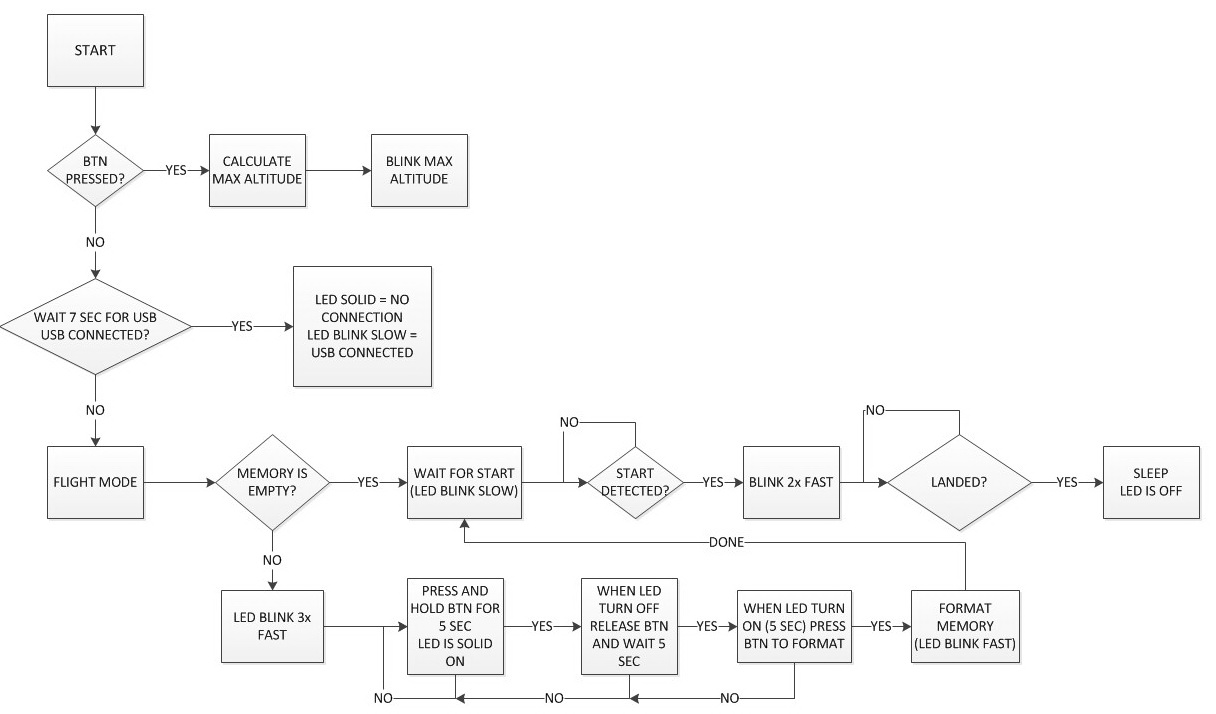
The firmware which has basically three main parts – USB part, on-the-field maximum altitude calculation and the flight mode is the same as for BREO M.
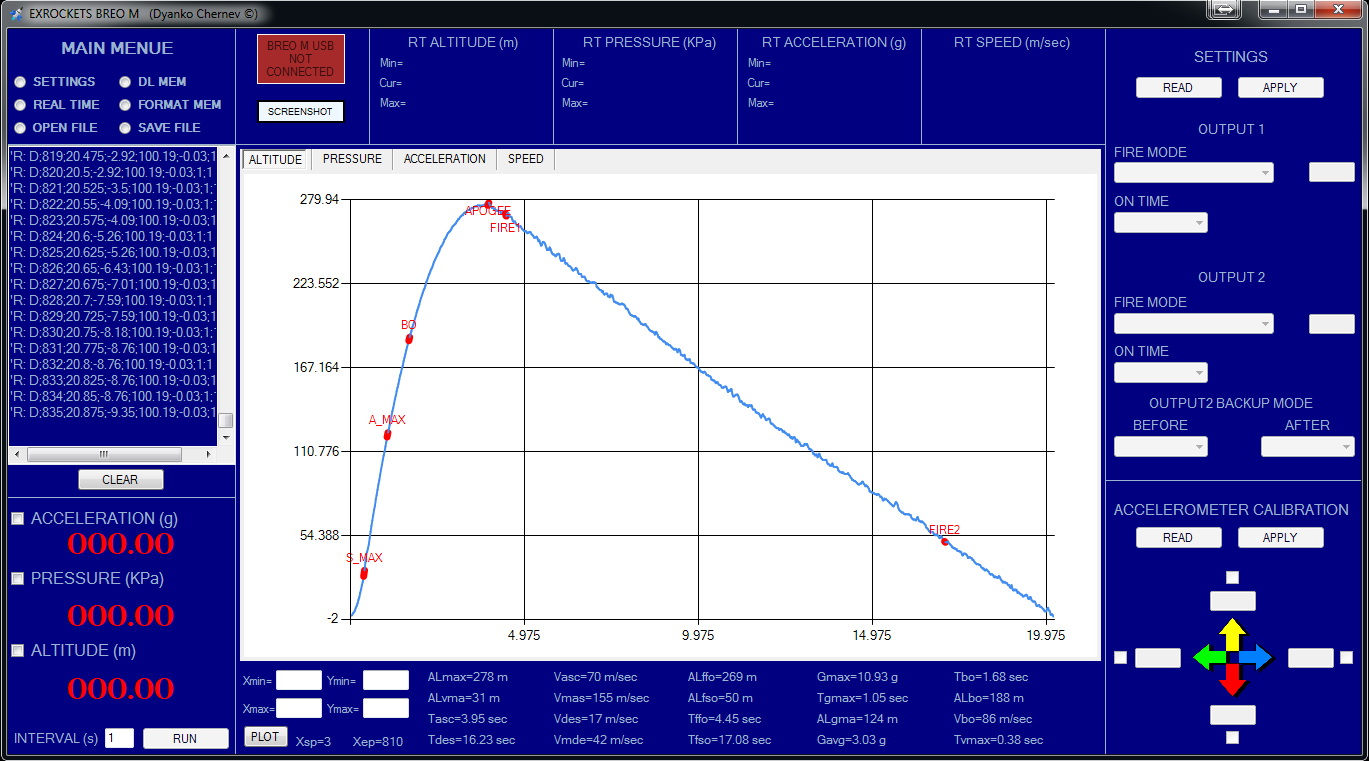
And regarding the PC software, the both devises share the same program.
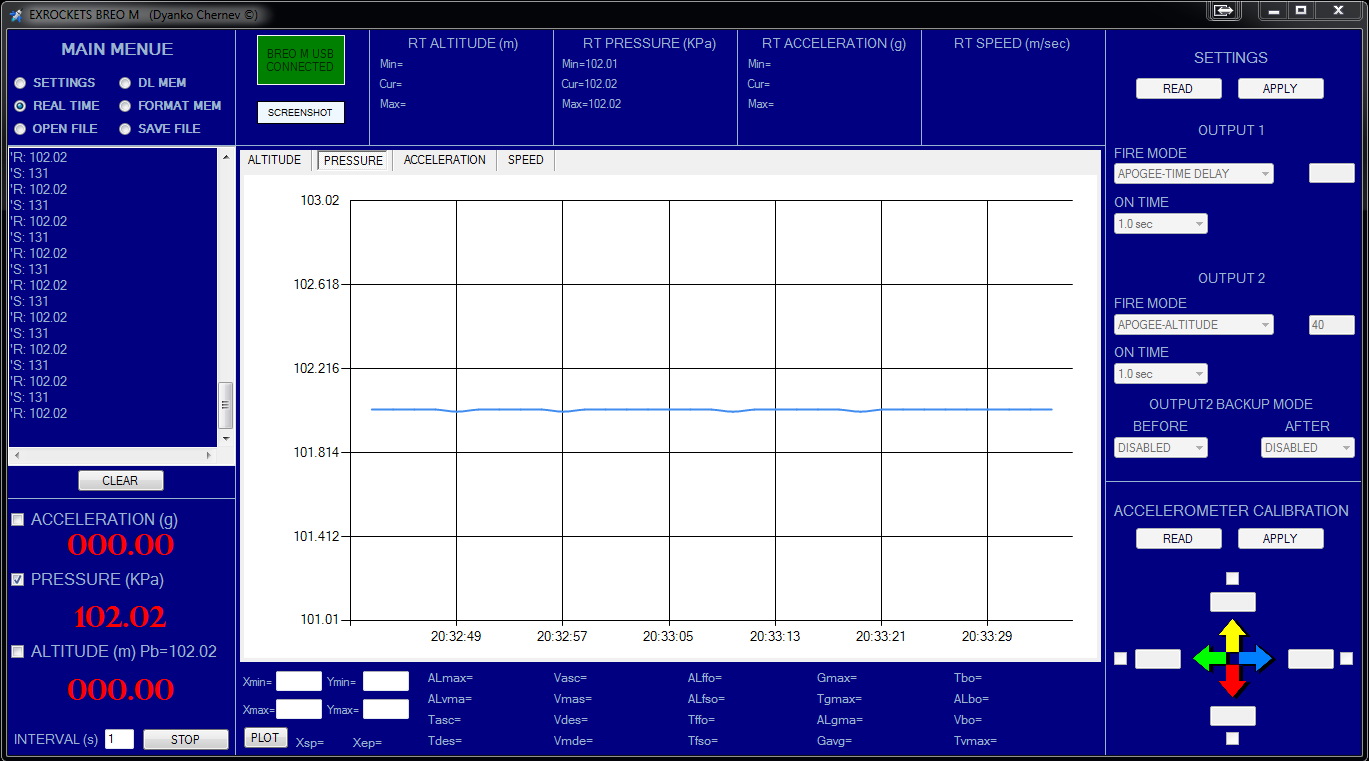
The flight computer passed so far the testing in my improvised barometric chamber and I hope soon to be tested in a real flight.
UPDATE:
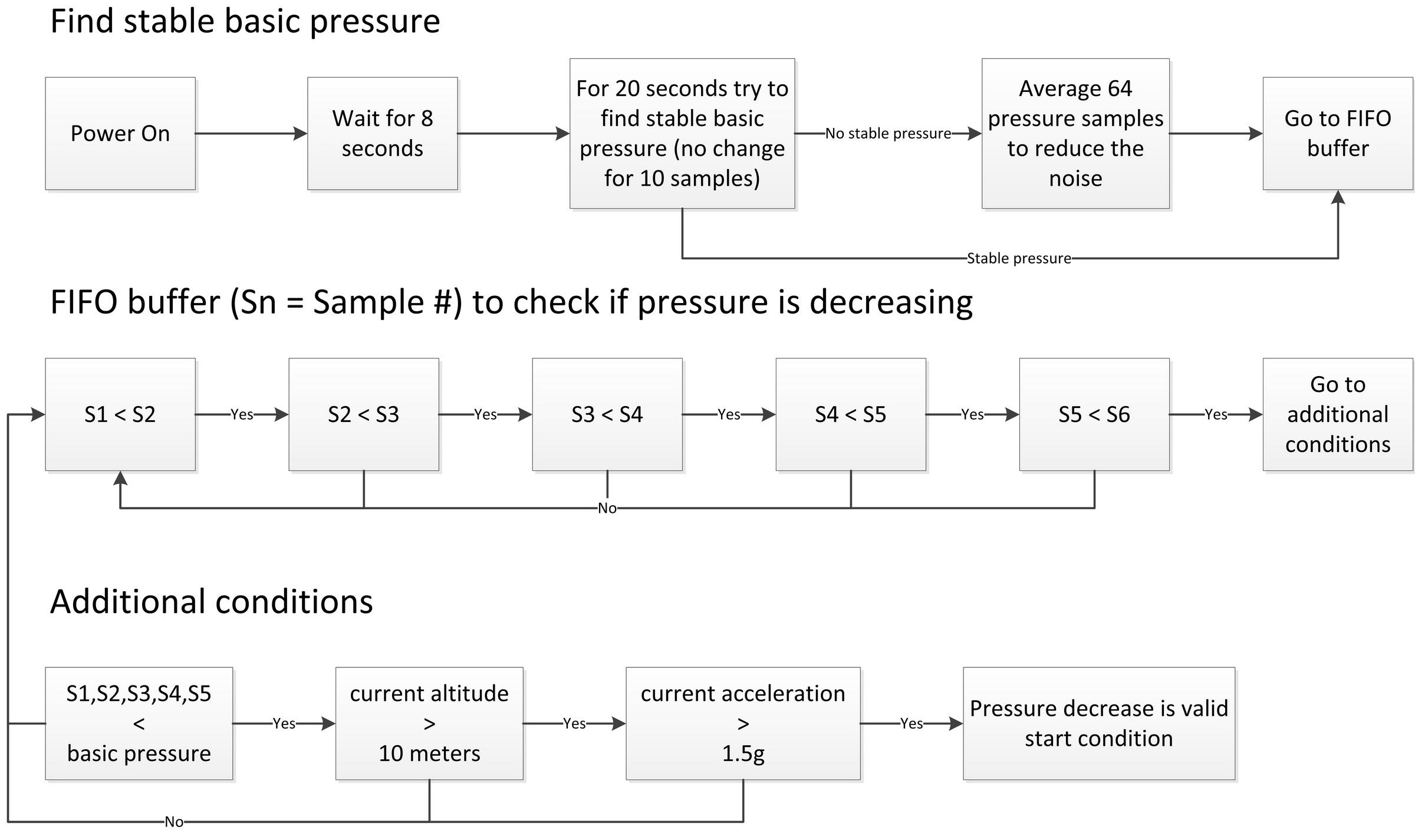
RocKI (http://kia-soft.narod.ru) mentioned a situation where a false start condition could trigger the flight computer. As a result the computer could be fooled and the ejection charge could be fired untimely. This situation arises when the electronic bay is tidily closed and the next bay is mounted on the top by pressing it down. This acts much like a piston and temporarily increases the pressure in the electronics bay. As soon as the pressure starts falling down to equalize with the surrounding pressure and if this is combined with a strong shaking of the rocket, then the start detecting algorithm will be fooled that the rocket is launched.
To avoid this problem I made some modifications in the firmware start detection algorithm – now it is much harder to have a faulty start triggering. However as a result of the new algorithm you should allow about 30 seconds between switching on the flight computer and launching the rocket. This time is necessary for the flight computer to make some additional calculations. Launching before those 30 seconds have elapsed could result in faulty initial calculations and this could have detrimental consequences.
MCU Firmware v1.4 (hex file)
BREO M/N APPLICATION v1.1
BREO_N_LM340MP – CADCAM.ZIP
BREO_N1_AMS1117_5 – CADCAM.ZIP
Hello, I can’t find the ad22393 in my country. Please tell me what to replace
will ADXL278 be suitable if you don’t use the Y axis
Hi, if you are planning to use the same PCB design, then you will need the AD22393Z, and I don’t know any drop-in replacements.
ADXL278 has an additional VDD3 pin, which AD22393Z is missing, thus I can’t say if it will work as drop-in replacement.
But if you are making your own PCB then you can use any suitable 5v analog acceleration sensor.
Hello, will fit the replacement instead of AD22393Z – > AD22293Z ?
Hello, there is no drop-in replacement for the sensor but any 5v analog sensor with appropriate acceleration range can be used. However you will have to re-design the PCB or simply find another way of connecting the sensor to VCC, GND and its output to the analog input of the micro-controller.
AD22393Z его даже на Али нет.
Hello! Please write what kind of MOSFETs are used? Preferably a name or a link.
is such a transistor suitable? IRLR2905
Hello Mikhail,
IRLR2905 can be used. There is however, a question if the acceleration sensor can be found at reasonable prices because it is now obsolete.
Regards
Не планируете новый полётный контроллер